Motor Controllers / ARIES/LYNX
 Get Quotation Now
Get Quotation NowARIES/LYNX adopted Motionnet, and actualized control up to 32 axes by connecting
LYNX (2 axes slave
controller) 15 units at maximum.
Using the touch panel type handy terminal "PYXIS" sold separately, operations
such as test run,
adjustment, etc. can be performed easily without PC.
[ Features ]
Adopted Motionnet
Adopting Motionnet, stage control for 32 axes at maximum is possible from a
host controller (PC, etc.) through a communication port.
The number of control axes can be extended with 2 axes
unit by connecting multiple LYNX units per ARIES.
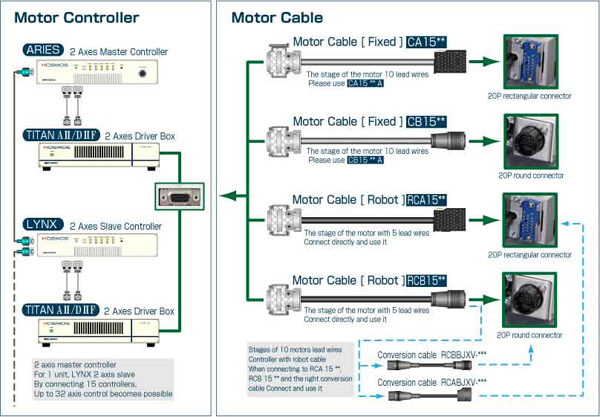
Motor Driver Discrete Type
Because a motor driver is a separate type, it can be connected to
various motor drivers with pulse raw command types as shown next.
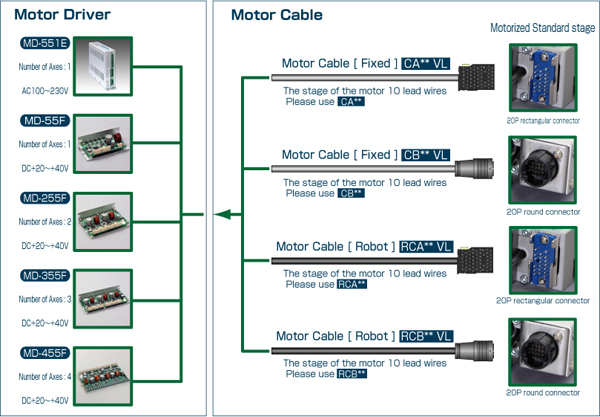
? 5-phase stepper motor driver
? 2-phase
stepper motor driver
? Servo motor driver
? ? STEP motor driver
Driver box "TITAN" series that system up
is possible easily with a cable connection are available.
Linear Interpolation Function
Linear interpolation drive is possible with optional 2 axes or 3
axes.
When a circular arc interpolation function (option) is necessary, please contact our sales department.
Trigger Output
Trigger signal synchronized to either motor pulse or encoder pulse in 2 axes
inside ARIES can be output for external measurement
equipment.
Also, trigger signal with synchronized
trigger signal with BUSY (driving) signal, constant signal, at start driving and at end driving,
and optional
timing (command issue) can be output.
General Input/Output
There are 8 points on general output signal that can optionally control
ON/OFF and on input signal that can monitor the ON/OFF
state respectively, and each is insulated with
photocoupler.
RS-232C, Ethernet 2 Types of Communication Port
ARIES is controlled with a command from host
controller (PC, etc.) through the communication por t. Two selectable
communication ports,RS-232C and Ethernet,
are equipped.
Driving with Handy Terminal, "PYXIS"
Using a touch panel type handy terminal, "PYXIS" (sold
separately), stage operation with manual
control is possible. Origin return, absolute position drive, relative
position drive, speed table
selection, setting changes of various system parameters, setting changes of each
speed table,
and emergency stop with the emergency stop switch are possible.
* Attached a power supply cable is for using in Japan. Please provide it by customer when a different power
supply cable is necessary. (~125V)
ARIES / LYNX Specifications
General
| Model | ARIES | LYNX |
| Outward Appearance | .jpg) |
.jpg) |
| Product Type | Master controller | Slave controller |
| Dimension (mm) | W213.4xH54.2xD290 | |
| Link Method | Motionnet? | |
| Number of Axes | 2 to 32 axes (ARIES: 2 axes, LYNX: 30 axes with 15 units expansion) | |
| Supply Voltage | AC90?240V?50?60Hz | |
| Consumption Power | 35VA MAX ?At AC100V supply? |
35VA MAX (At AC100V supply) |
| Operating Enviroment | ?Operating temperature: 0?40? Operating humidity: 30?85% (should be no condensation) |
|
| Weight (kg) | 1.45 | 1.25 |
Function
| Model | ARIES | LYNX |
| Motion Control | ?Absolute position drive, relative position drive, multi-axes simultaneous
drive ?(4 axes MAX), Origin return drive, ?linear interpolation drive (3 axes MAX), Repeated round-trip drive, Backlash ??correction drive, Feedback drive, Continuous drive |
|
| Velocity Control | ?? Drive pulse frequency : 1 pps ? 500 kpps ?? Acceleration/Deceleration pattern : Rectunglar drive , Trapezoidal drive ????(Acceleration/Deceleration is symmetrical) ?? Others : Speed table with 10 type |
|
| Set Movement amount | 15 types (combination of ORG, NORG, CW limit, CCW limit, and Z phase) | |
| Home Position Return | 15 types (combination of ORG, NORG, CW limit, CCW limit, and Z phase) | |
| Output Signal | ?? CW direction pulse, CCW direction pulse, current OFF signal ?? Trigger signal (differential signal output) ?? Servo pack signal (servo ON signal, alarm reset signal) ?? General output signal |
|
| Input Signal | ?? Sensor signal (CW limit, CCW limit, NORG "Origin proximity", ORG
"Origin") ???[12V pull up photocoupler input] ?? Servo pack signal (servo ready, positioning complete, alarm) ?? Emergency stop signal [24V pull up photocoupler input] ?? Encoder signal (A phase, B phase, Z phase) (Differential signal input) ???Input Frequency (4 multiplication conversion): MAX 13MHz ???(With disabled filter: MAX 20MHz) |
|
| Display | Sensor condition, BUSY condition, emergency stop condition LED | |
| Trigger Function (Only 1st or 2nd axis) |
?? Driving pulse or encoder pulse synchronization signal (thinning setting
possible) ?? BUSY (Driving signal) ?? Constant speed signal ?? One shot output at driving start & end (pulse width setting possible) ?? One shot output with command (TFR) issuing timing ???(pulse width setting possible) |
|
| Communication Interface | RS-232C?Ethernet?TCP?IP? | |
| Accessories | ?CD-ROM (Operation Manual), Power supply cable (2m), ??????????emergency stop signal short plug ?Motionnet terminal plug (ARIES only), Motionnet cable 0.5m (LINX only) |
|
| Option | PYXIS (Touch panel type handy terminal for ARIES) Price: ?90,000 | |
TITAN-A?/D?F Specifcation
General
| Model | TITAN-A? | TITAN-D?F |
| Outward Appearance | .jpg) |
.jpg) |
| Product Type | 5-phase stepper motor driver box (Built-in AC power driver) |
5-phase stepper motor driver box (Built-in DC power driver) |
| Dimension (mm) | W213.4xH61xD420 | W213.4xH61xD290 |
| Number of Axes | 2 | |
| Supply Voltage | AC90?240V?50/60Hz | |
| Output Voltage | AC90?240V?50/60Hz MAX 1A | |
| Consumption Power | 430VA MAX (At AC100V supply) | 160VA MAX (At AC100V supply) |
| Operating Enviroment | Operating temperature: 0?40? Operating humidity: 30?85% (should be no condensation) |
|
| Weight (kg) | 3.9 | 2.1 |
Function
| Model | TITAN-A? | TITAN-D?F |
| Input/Output Signal to Controller | ?? Command pulse signal, Hold OFF, Division Selection ?? Sensor signal (CW limit, CCW limit, NORG "Origin proximity", ORG "Origin") |
|
| Input/Output Signal to Stage | ?? Motor excitation signal ?? Sensor signal (CW limit, CCW limit, NORG "Origin proximity", ORG "Origin") |
|
| Maximum Frecquency | 500kpps | |
| Accessories | AC power input cable (2m), AC power output cable (0.5m) | |
Driver Specification
| Model | TITAN-A? | TITAN-D?F |
| Driver Model | MD-551E 2 pieces | MD-255F |
| Driving Motor | 5-phase stepper motor | |
| Driving Method | Bipolar constant current pentagon | |
| Driving Current | 16 types, rotary switch settings 0.35,0.42,0.50,0.58,0.66,0.75,0.81,0.88, 0.96,1.03,1.11,1.18,1.26,1.33, |
Dip selector switch 0.35A/phase,0.75A/phase,1.4A/phase |
| Stop Current(%) | Proportion(%) for the set driving current 16 types, rotary switch settings 12,19,23,30,37,44,48,55,57,64,68,75,81,87,92,98 |
Dip selector switch 25%, 50% and 75% of set driving current |
| Micro-Step Division | 16 types, rotary switch settings (2 types in M1 and M2) 1,2,4,5,8,10,20,40,80,16,25,50,100,125,200,250 |
16 types, rotary switch settings. Switch the function selector switch 2 and 3 series 2series?1,2,4,5,8,10,20,40,80,16,25,50,100, 125,200,250 3series?1,2,3,6,12,18,24,32,36,48,60,72,120, 160,180,240 |
| Others Function | Excitation OFF | |